The Skid Steer drive is truly a classic drive system. Usually incorporating treads or 6 wheels, good examples of skid-steer drives in real life include excavators, tanks, and other utility construction equipment.
A common variation of the differential drive (more on that later), the skid-steer has:
-better grip on rough floors/terrains
-more torque and power, where friction uses up some of the motors power
-easily maneuverable, however programming a skid steer to go straight is a little tricky.

The one I built above uses two motors powered by the same RCX. The chassis is divided into three parts (seen here). Two different mounts for each independent tread, and a central mount for the RCX and motors.
The wider base provides stability, which is important for slow moving treads, and a low center of gravity keeps accidents like tipping, and slipping from occurring.
 |
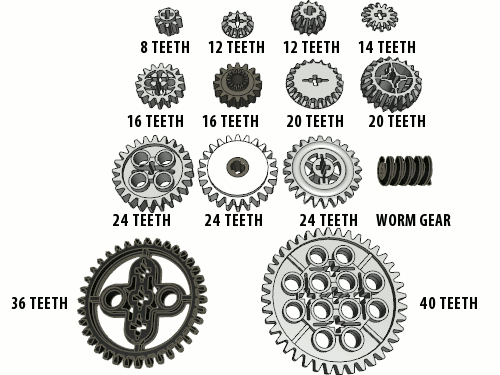
| An example of a clutch gear. |
Another important component of a skid-steer (and pretty much all drives) is to incorporate elements to keep your motor from jamming. If a tread or a wheel gets caught, but the motor keeps trying to apply power, there's a dangerous chance of a lot of broken parts. My design incorporates a clutch gear which provides a certain domain of resistance before the clutch keeps the motor spinning with no damage (regardless of the status of the wheels).
Finally, shifting gears, and increasing the ratio provides massive increases in power, sacrificing speed in the process. Because my motor is directly linked to the 8t, which turns the 24t, my gear ratio ends up like:
8t : 24t = 1:3
Which basically means that my wheels are turning at 3x the power the motor is outputting.
Skid-steer drives are fun to build, and even more satisfying to watch in action, and I definitely recommend experimenting with a few of your own designs to get started. If you have any alternate designs or suggestions shoot me an email: ashwin.johri@gmail.com





.jpg)